The results of the experiments carried out for the self tuning PI controller using Direct Synthesis method are shown.
The upper plot shows the variations of the set point temperature (the black line) and the actual temperature (the green line)
in the SBHS. The second plot shows the control effort and the third shows the fan input.
Figure 9.28:
Results for fan input change from 50 to 100 for self tuning PI Controller designed using Direct Synthesis
|
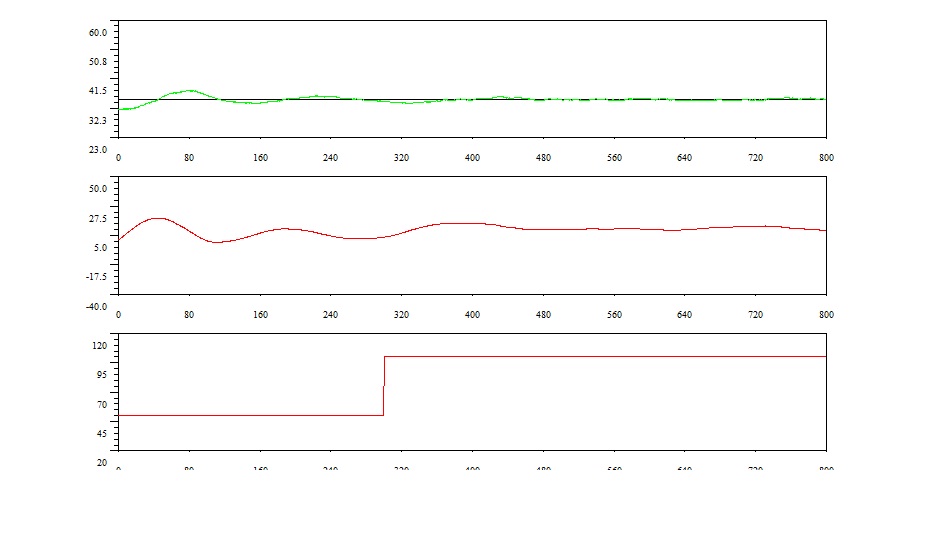 |
The change in the fan input introduces a small dent in the temperature. However, the controller brings the temperature
back to the set point. Notice the slight change in the controller behaviour on encountering the fan input change. The
time taken for stabilising back is also low.
Here, results for fan input change from 100 to 50 are also shown.
Figure 9.29:
Results for fan input change from 100 to 50 for self tuning PI controller designed using Direct Synthesis
|
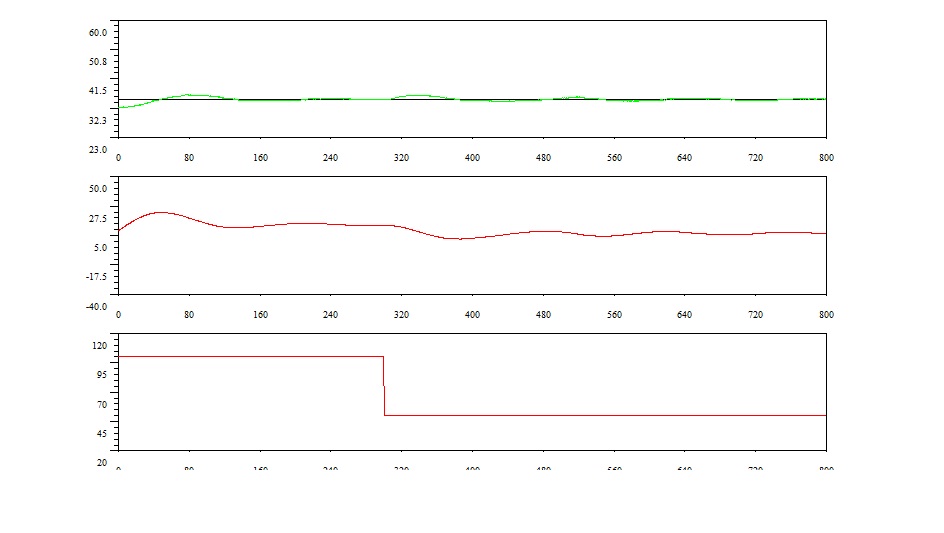 |
In this figure also, the temperature clearly increases a bit when the step change in the fan input is encountered. However,
it quickly stabilises back and continues to be close to the set point.
From the above two results, it is clear that the self tuning controller designed with Direct Syntheis has successfully
rejected the disturbance.
For comparison, results of the disturbance change for conventional PI Controller designed with direct synthesis are also shown.
Figure 9.30:
Results for the fan input change from 50 to 100 to conventional PI controller designed using Direct Synthesis
|
|
Figure 9.31:
Results for the fan input change from 100 to 50 to conventional PI controller designed using Direct Synthesis
|
|
rokade
2017-04-23