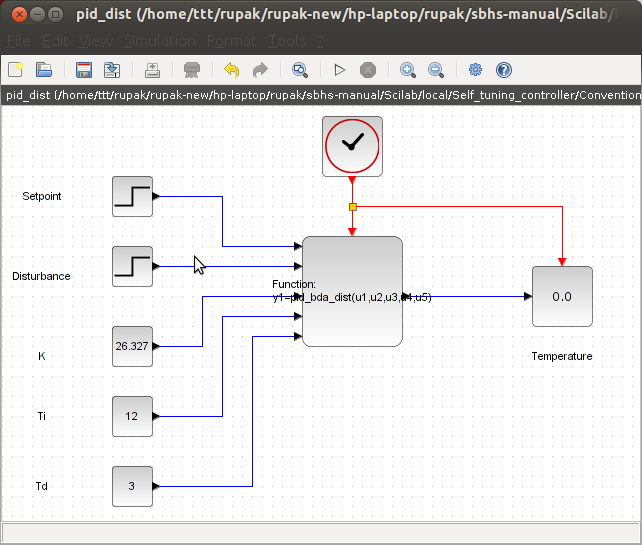
Figure 9.12:
Xcos diagram for PID controller
|
 |
The PID Controller in continuous time is given by
![$\displaystyle u(t) = K \left[e(t) + \frac 1{\tau_i}\int_0^t e(t)dt + \tau_d \frac{de(t)}{dt}\right]$](img417.png) |
(9.15) |
On taking Laplace Transform, we obtain
By mapping equation 9.16 to discrete time interval by using the Trapezoidal Approximation for integral mode and
Backward Difference Approximation for derivative mode, we get
![$\displaystyle u(n) = K \left[1 + \frac{T_s}{\tau_i} \frac{z}{z-1} + \frac{\tau_d}{T_s} \frac{z-1}{z}\right]e(n)$](img419.png) |
(9.17) |
On cross multiplication, we obtain
![$\displaystyle (z^2-z)\times u(n) = K \left[(z^2-z) + \frac{T_s}{\tau_i} (z^2) + \frac{\tau_d}{T_s} (z-1)^2\right]e(n)$](img420.png) |
(9.18) |
We divide by z, and using the shifting theorem, we obtain
![$\displaystyle u(n) - u(n-1) = K \left[e(n) - e(n-1) + \frac{T_s}{\tau_i} e(n) + \frac{\tau_d}{T_s}\left\{e(n) - 2e(n-1) + e(n-1)\right\}\right]$](img421.png) |
(9.19) |
The PID Controller is usually written as
 |
(9.20) |
where,
rokade
2017-04-23
![$\displaystyle =K\left[-1-2\frac{\tau_d}{T_s}\right]$](img200.png)
![$\displaystyle =K\left[\frac{\tau_d}{T_s}\right]$](img202.png)
![$\displaystyle u(s) = K \left[1 + \frac 1{\tau_i s} + \tau_d s\right]e(s)$](img418.png)