You can also use the Xcos file twodof_simulation.xcos, shown in figure 6.4, to simulate your controller before implementing on SBHS. This will help you validate your controller. You need to execute getd dc/scilab and then execute the file twodof_para.sce. Now run twodof_simulation.xcos. Figure 6.5 shows the simulation results. Note that, execution of this Xcos file is not mandatory for performing a virtual experiment.
Figure 6.4:
Xcos diagram for simulating 2-DOF controller
|
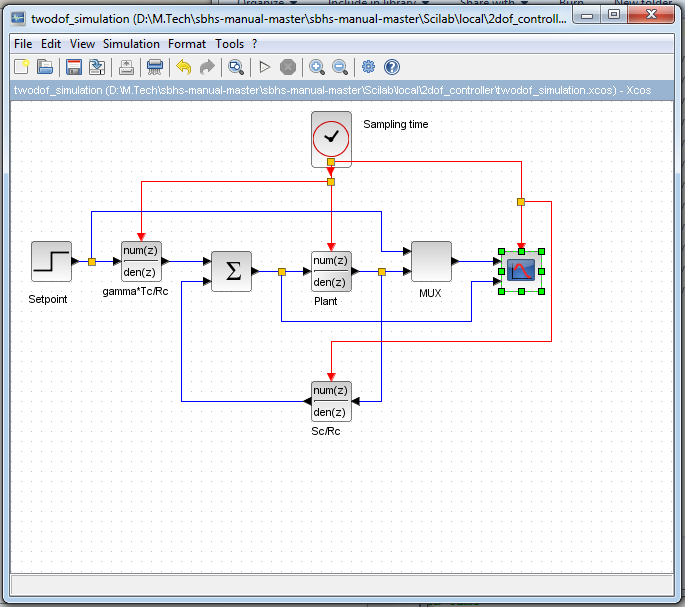 |
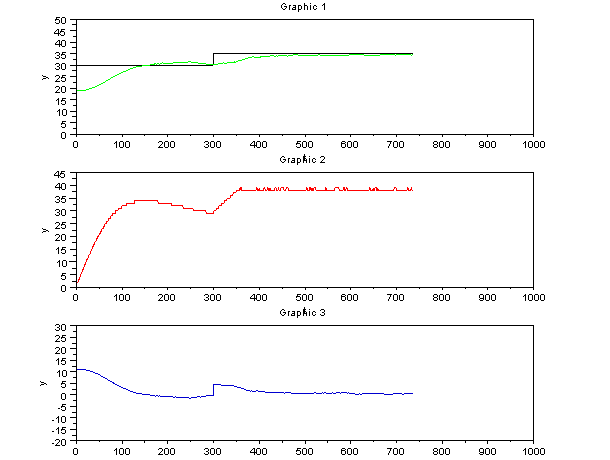
Figure 6.5:
Simulation results after executing twodof_simulation.xcos
|
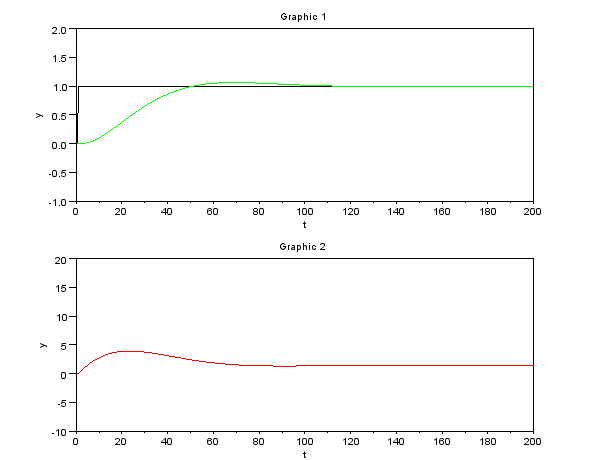 |
Figure 6.6:
Scilab output for twodof_para.sce
|
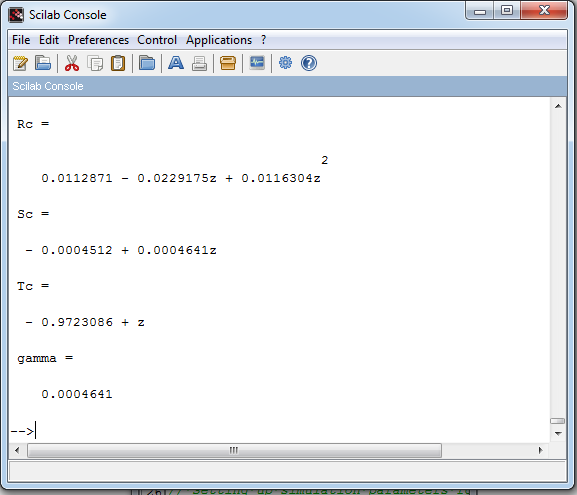 |
Figure 6.7:
Xcos diagram for 2-DOF controller
|
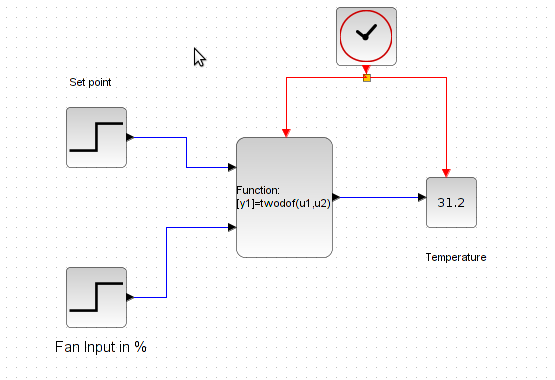 |
The performance of the controller is shown in figure 6.8.
Figure 6.8:
Implementation of 2-DOF controller
|
 |
It is seen that the output (temperature) tracks the setpoint irrespective of the step changes in the fan speed.
We see that the overshoot turns out to be 6% and rise time turns out to be 60 seconds, which is acceptable.
rokade
2017-04-23