Next: Steps for Designing IMC Up: Implementing Internal Model Controller Previous: Implementing Internal Model Controller
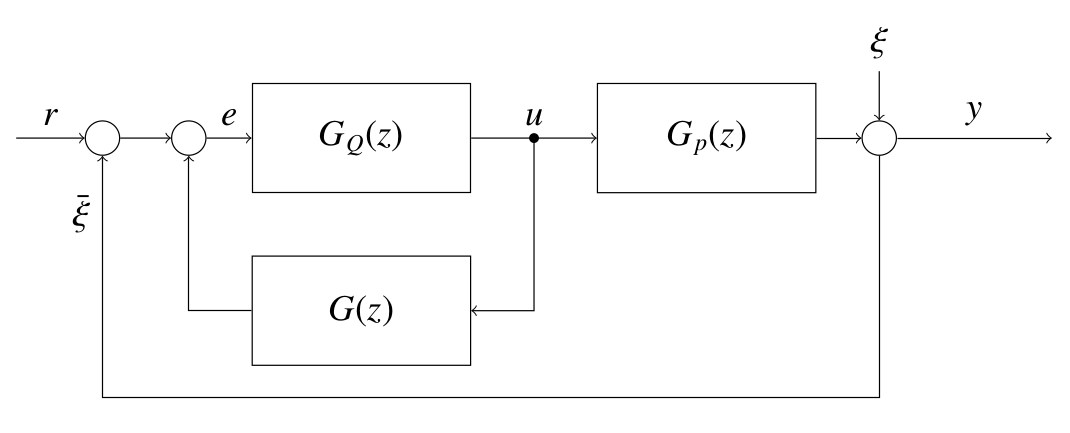
Let the transfer function of the stable plant be denoted by ![]() and its model is denoted by
and its model is denoted by ![]() . Hence
. Hence
| (8.1) |
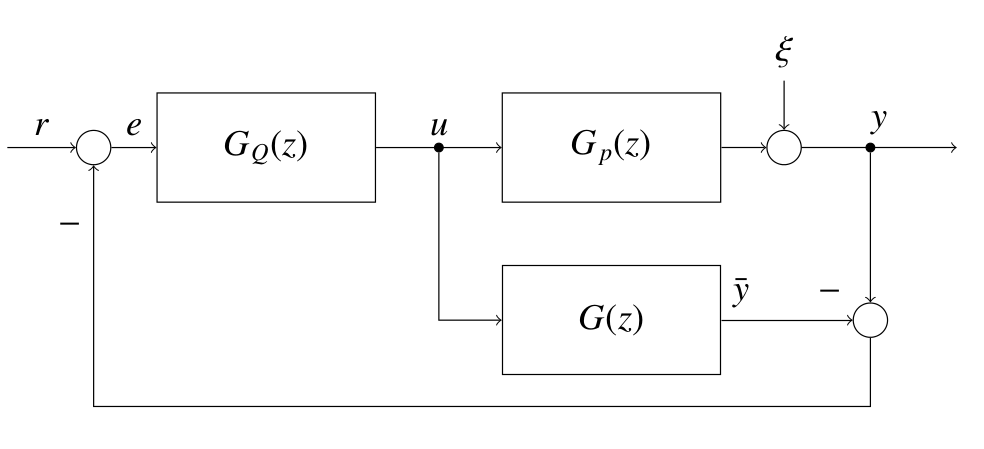
For noise rejection with y=0, we require
![]() and
and ![]() , i.e., for stable
, i.e., for stable ![]() we require
an approximate inverse of G. Also, for internal stability, transfer function between any two points
in the feedback loop must be stable [1].
we require
an approximate inverse of G. Also, for internal stability, transfer function between any two points
in the feedback loop must be stable [1].